Project 1a
©Jorg Peters
Points: 35
Purpose
Learn how to use affine transformations to position
objects in 3-space
Resources
Set Up
- Use one of: OpenGL or webGL
- For openGL use this code base
- For webGL started code is not provided.
Task 1: Grid
Points: 5
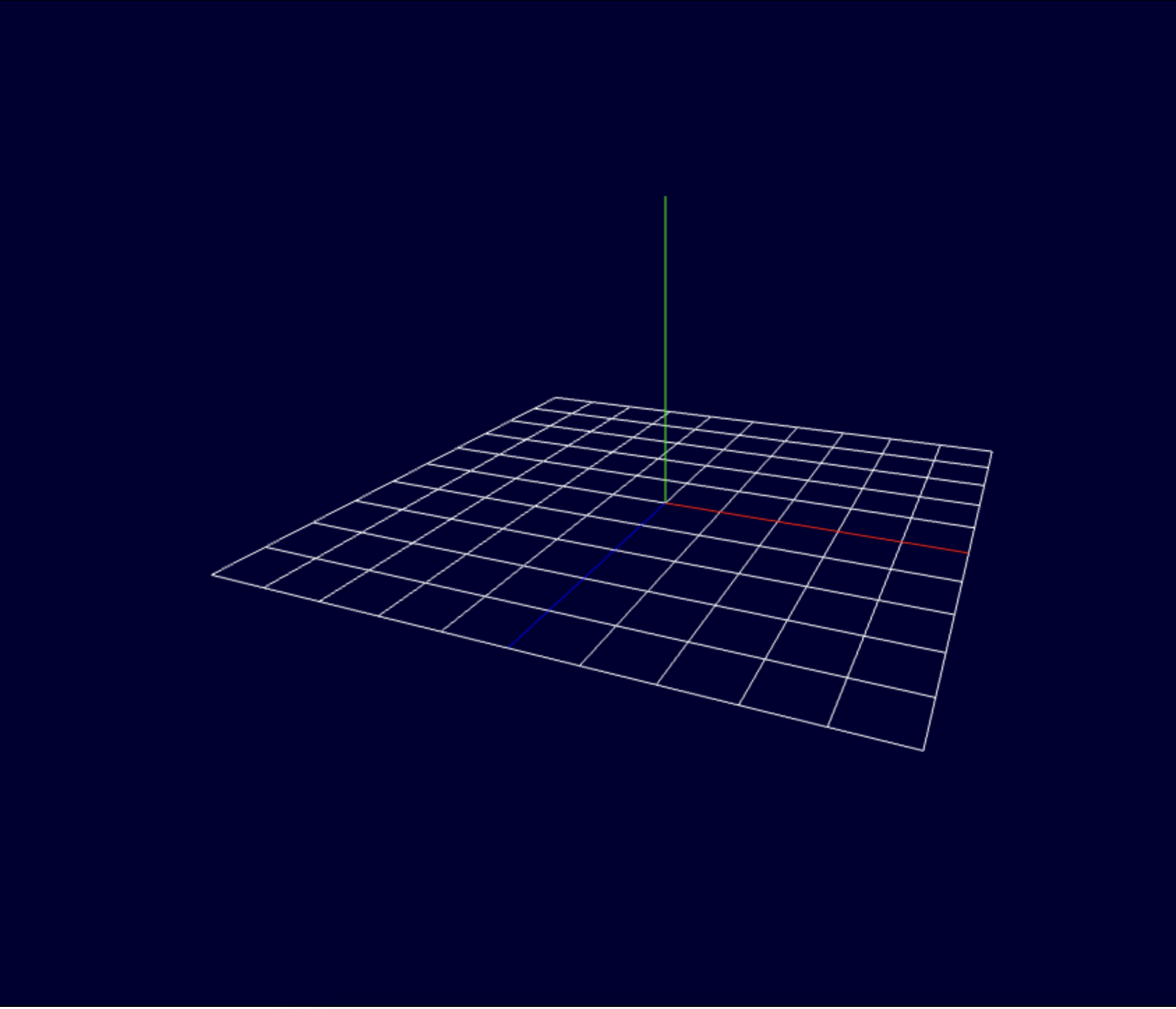
Draw an integer grid on the Y=0-plane for the rectangle
(-5,0,-5) to (+5,0,+5).
Draw the positive X axis in red, the Y axis in green and
the Z axis in blue.
Only draw the positive portion of each axis, of length 5.
Task 2: Camera Rotations
Points: 5
Use Perspective projection
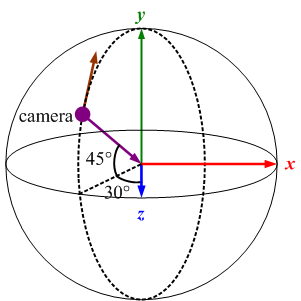
Place the camera so you can see the whole scene:
use glm::LookAt to generate the View matrix.
Key C selects the camera.
Keys
← and
→
move the camera along the blue circle parallel to the equator.
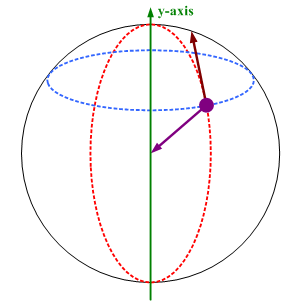
Keys
↑ and
↓
rotate the camera along the red circle orthogonal to the equator.
Choose the "up" direction so the camera always points
to the origin.
Task 3: Draw the robot arm
Points: 25


The robot arm consists of the following parts:
- Base:
truncated tetrahedron placed on the x-z-plane
- Arm1:
rectangular box emmanating from and
hinged at the center of Base.
- Joint:
dodecahedron of appropriate radius at the other end of Arm1.
- Arm2:
cylinder connected to the center of Joint.
Create triangulated objects in the .obj format, e.g. by using Blender.
Hint: generate correct normals for later use.
To load .obj files use the simple supplied obj loader
bool loadOBJ(
const char *path,
std::vector &out_vertices,
std::vector &out_uvs,
std::vector &out_normals,
std::vector &out_indices)
or use
tinyobjloader
(usage best learned by looking at the examples on github)
or find alternative online
WHAT TO SUBMIT
- Your modified source files
(cpp, shader, html, obj, as appropriate)
Filepaths to load models must be relative to the source directory
(no absolute paths specific to your PC).
- A link to a screen capture of your
running program showcasing the implementation
of all of the tasks using
recordit (Mac, Win)
or similar software.
List tasks in order and demonstrate or state that you did not implement
(and briefly why).