Abstract
Immersive virtual environments (VEs) provide participants with computer-generated environments filled with virtual objects to assist in learning, training, and practicing dangerous and/or expensive tasks. But does having every object being virtual inhibit the interactivity and level of immersion for certain tasks? If participants spent most of their time and cognitive load on learning and adapting to interacting with a purely virtual system, does this reduce the VE effectiveness?
We
conducted a study that investigated how handling real objects and self-avatar
visual fidelity affects performance and sense-of-presence on a spatial
cognitive manual task. We compared
participants’ performance of a block arrangement task in both a real-space
environment and several virtual and hybrid environments. The results showed that manipulating real
objects in a VE brings task performance closer to that of real space, compared
to manipulating virtual objects. There
was not a significant difference in reported sense-of-presence, regardless of
the self-avatar’s visual fidelity or the presence of real objects.
Keywords: Virtual Environments, Sense
of Presence, Human-Computer Interaction
1. Introduction
1.1. Motivation
Conducting design evaluation and assembly feasibility evaluation tasks in immersive virtual environments (VEs) enables designers to evaluate and validate multiple alternative designs more quickly and cheaply than if mock-ups are built and more thoroughly than can be done from drawings. Design review has become one of the major productive applications of VEs [1]. Virtual models can be used to study the following important design questions:
· Can an artifact readily be assembled?
· Can repairers readily service it?
The ideal VE system would have the participant fully believe he was actually performing a task. In the assembly verification example, parts and tools would have mass, feel real, and handle appropriately. The participant would naturally interact with the virtual world, and in turn, the virtual objects would respond to the participant’s action appropriately [2].
1.2. Current VE Methods
Obviously, current VEs are far from that ideal system. Indeed, not interacting with every object as if it were real has distinct advantages, as in dangerous or expensive tasks. In current VEs, almost all objects in the environment are virtual, but both assembly and servicing are hands-on tasks, and the principal drawback of virtual models — that there is nothing there to feel, nothing to give manual affordances, and nothing to constrain motions — is a serious one for these applications.
Simulating a wrench with a six degree-of-freedom wand, for example, is far from realistic, perhaps too unrealistic to be useful. Imagine trying to simulate a task as basic as unscrewing an oil filter from an engine in such a VE!
Interacting with purely virtual objects could impose three limiting factors on VEs:
· Limits the types of feedback, such as motion constraints and haptics, the system could provide the user.
· The VE representation of real objects (real-object avatars) is usually stylized and not necessarily visually faithful to the object itself.
· Hinders real objects (including the user) from naturally interacting with virtual objects.
This work investigates the impact of these two factors on task performance and sense of presence in a spatial cognitive task. As opposed to perceptual motor tasks (e.g., pick up a pen), cognitive tasks require problem-solving decisions on actions (e.g., pick up a red pen). Most design verification and training tasks are cognitive.
We extend our definition of an avatar to include a virtual representation of any real object, not just the participant. The real-object avatar is registered with the real object, and ideally, they are registered in look, form, and function with the real object. The self-avatar refers specifically to the user’s virtual representation.
We believe a hybrid environment system, one that could handle dynamic real objects, would be effective in providing natural interactivity and visually-faithful self-avatars. In turn, this should improve task performance and sense of presence.
The advantages of interacting with real objects could enable applying VEs to tasks that are hampered by using all virtual objects. We believe spatial cognitive manual tasks, common in simulation and training VEs, would benefit from incorporating real objects. These tasks require problem solving through manipulating objects while maintaining spatial relationships.
2. Previous Work
2.1. Self-Avatars
The user is represented within the VE by a self-avatar, either from a library of representations, a generic self-avatar, or no self-avatar. A survey of VE research shows the most common approach is a generic self-avatar – literally, one size fits all [1]. The participant’s self-avatars are typically stylized human models, such as those found in commercial packages. These models, while containing a substantial amount of detail, do not visually match a participant’s appearance.
Researchers believe that providing generic self-avatars substantially improves sense-of-presence over providing no self-avatar [3]. However, they hypothesize that the visual misrepresentation of self would reduce how much a participant believed he was “in” the virtual world, his sense-of-presence. Usoh hypothesizes, “Substantial potential presence gains can be had from tracking all limbs and customizing [self-]avatar appearance [4].”
Recent studies suggest that even crude self-avatar representations convey substantial information. Even having some representation of the participants in the environment was important for navigation, social interaction, and task performance [5]. With self-avatars, emotions such as embarrassment, irritation, and self-awareness could be generated [6][7].
Providing realistic self-avatars requires capturing the participant’s motion, shape, and appearance. In general, VE systems attach extra trackers to the participant for sensing changing positions to drive an articulated stock self-avatar model. Presenting and controlling an accurate representation of the participant’s shape and pose is difficult due to the human body’s deformability and numerous degrees of freedom. Matching the virtual look to the physical reality is difficult to do dynamically, though commercial systems, such as the AvatarMe system, that generate static-textured, personalized self-avatars are available [8].
2.2. Interactions in VEs
Ideally, a participant should be able to interact with the VE by natural speech and natural body motions. The VE system would understand and react to expressions, gestures, and motion. The difficulty is in capturing this information, both for rendering images and for input to simulations.
The fundamental interaction problem is that most things are not real in a virtual environment. In effort to address this, some VEs provide tracked, instrumented real objects as input devices. Common interaction devices include an articulated glove with gesture recognition or buttons (Immersion’s Cyberglove), tracked mouse (Ascension Technology’s 6D Mouse), or tracked joystick (Fakespace’s NeoWand).
Another approach is to engineer a device for a specific type of interaction. This typically improves interaction affordance, so that the participant interacts with the system in a more natural manner. For example, augmenting a doll’s head with sliding rods and trackers enables doctors to more naturally select cutting planes for visualizing MRI data [9]. However, this specialized engineering is time-consuming and often usable for only a particular type of task. VE interaction studies have been done on interaction ontologies [10], interaction methodologies [11], and 3-D GUI widgets and physical interaction [12].
3. User Study
3.1. Study Goals
We started off trying to prove the following: For cognitive tasks,
· Does interacting with real objects improve task performance?
· Does seeing a visually faithful self-avatar improve sense-of-presence?
To test this, we employed a hybrid system that can incorporate dynamic real objects into a VE. It uses multiple cameras to generate virtual representations of real objects at interactive rates [13]. Thus we could investigate how cognitive tasks performance is affected by interacting with real versus virtual objects. The results would be useful for training and assembly verification VEs, which often require problem solving while interacting with tools and parts.
Video capture of real object appearance also has another potential advantage — enhanced visual realism. Generating virtual representations of the participant in real time would allow the system to render a visually faithful self-avatar. The real-object appearance is captured from a camera that has a similar line of sight as the participant. Thus the system also allows us to investigate on whether having a visually faithful self-avatar, as opposed to a generic self-avatar, increases sense-of-presence. The results will provide insight into the need to invest the additional effort to render a high-fidelity visual self-avatar. This will be useful for immersive virtual environments that aim for high sense-of-presence, such as phobia treatment and entertainment VEs.
3.2. Task Description
We sought to abstract tasks common to VE design applications. In surveying production VEs [1], we noted that a substantial number involve participants doing spatial cognitive manual tasks.
We specifically wanted to use a task that focused on cognition and manipulation over participant dexterity or reaction speed because of current technology, typical VE applications, and participant physical variability. We conducted a user study on a block arrangement task. We compared a purely virtual task system and two hybrid task systems that differed in level of visual fidelity. In all three cases, we used a real-space task as a baseline.
The task we designed is similar to, and based on, the block design portion of the Wechsler Adult Intelligence Scale (WAIS). Developed in 1939, the Wechsler Adult Intelligence Scale is a test widely used to measure IQ [14]. The block-design component measures reasoning, problem solving, and spatial visualization.
In the standard WAIS block design task, participants manipulate one-inch cubes to match target patterns. As the WAIS test is copyrighted, we modified the task to still require cognitive and problem solving skills while focusing on interaction methodologies. Also, the small one-inch cubes of the WAIS would be difficult to manipulate with purely virtual approaches and hamper the conditions that used the reconstruction system due to reconstruction error. We increased the size of the blocks to three-inch cubes, as shown in Figure 1.
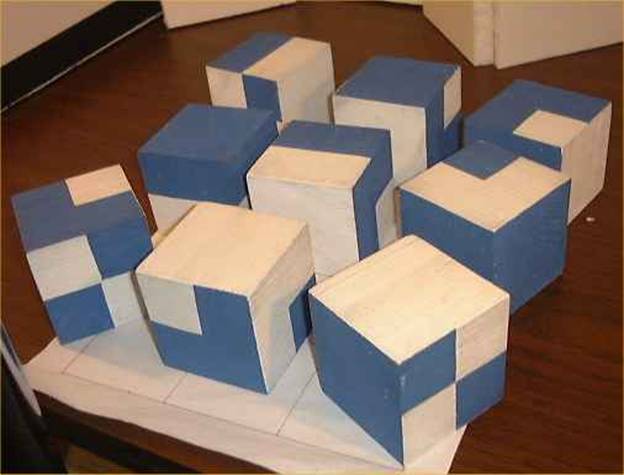
Participants manipulated four or nine identical wooden blocks to make the top face of the blocks match a target pattern. Each cube had six patterns on its faces that represented the possible quadrant-divided white-blue patterns. There were two target patterns sizes, small four-block patterns in a 2 x 2 arrangement, and large nine-block patterns in a 3 x 3 arrangement.
3.3. Task Design
The user study was a
between-subjects design. Each
participant performed the task in a real space environment (RSE), and then in a
VE condition. The independent variables
were the VE interaction modality (real or virtual blocks) and the VE
self-avatar visual fidelity (generic or visually faithful). The three VE conditions had:
· Virtual objects, generic self-avatar (purely virtual environment - PVE)
· Real objects, generic self-avatar (hybrid environment - HE)
· Real objects, visually faithful self-avatar (visually-faithful hybrid environment - VFHE)
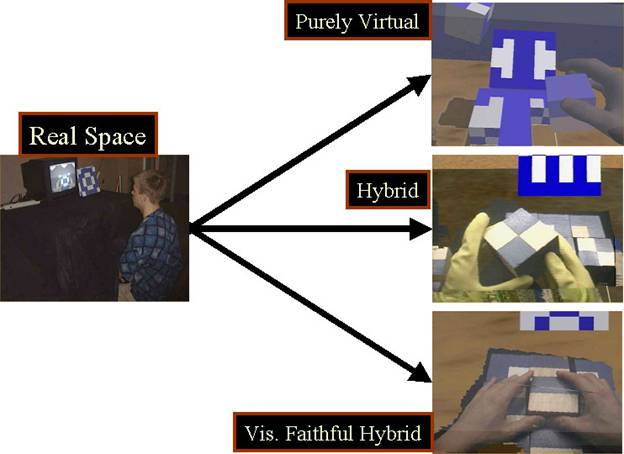
The task was accessible to all participants, and the target patterns were intentionally of a medium difficulty (determined through pilot testing). Our goal was to use target patterns that were not so cognitively easy as to be manual dexterity tests, nor so difficult that participant spatial ability dominated the data. The participants were randomly assigned to one of the three groups, 1) RSE then PVE, 2) RSE then HE, or 3) RSE then VFHE (Figure 2).

Real Space Environment (RSE). The participant sat at a desk (Figure 3) with nine wooden blocks inside a rectangular enclosure. The side facing the participant was open and the whole enclosure was draped with a dark cloth. Two small lights lit the inside of the enclosure. A television placed atop the enclosure displayed the video feed from a “lipstick camera” mounted inside the enclosure. The camera had a similar line of sight as the participant, and the participant performed the task while watching the TV.

Purely Virtual Environment (PVE). Participants stood at a four-foot high table, and wore Fakespace Pinchgloves, each tracked with Polhemus Fastrak trackers, and a Virtual Research V8 head-mounted display (HMD) (Figure 4). The participant picked up a virtual block by pinching two fingers together (i.e. thumb and forefinger). When the participant released the pinch, the virtual block was dropped and an open hand avatar was displayed. The self-avatar’s appearance was generic (its color was a neutral gray).
The block closest to an avatar’s hand was highlighted to inform the participant which block would be selected by pinching. Pinching caused the virtual block to snap into the virtual avatar’s hand, and the hand appeared to be holding the block. To rotate the block, the participant rotated his hand while maintaining the pinching gesture.
Releasing the block within six inches of the workspace surface caused the block snapped into an unoccupied position in a three by three grid on the table. This reduced the fine-grained interaction that would have artificially inflated the time to complete the task. Releasing the block away from the grid caused it to simply drop onto the table. Releasing the block more than six inches above the table caused the block to float in mid-air to aid in rotation. There was no inter-block collision detection, and block interpenetration was not automatically resolved.
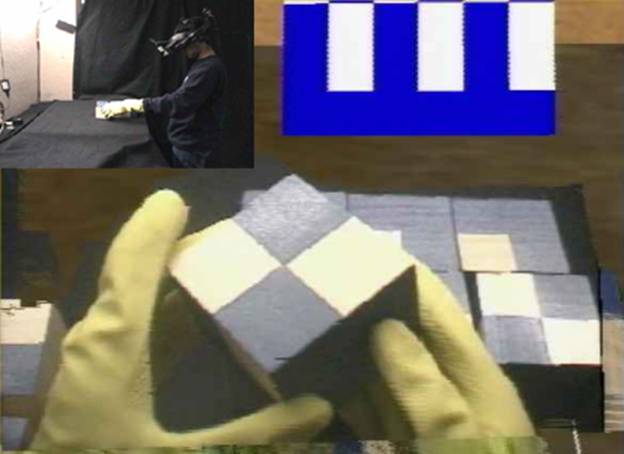
Hybrid Environment (HE). Participants wore yellow dishwashing gloves and the HMD (Figure 5). Within the VE, participants handled physical blocks, identical to the RSE blocks, and saw a self-avatar with accurate shape and generic appearance (due to the gloves).
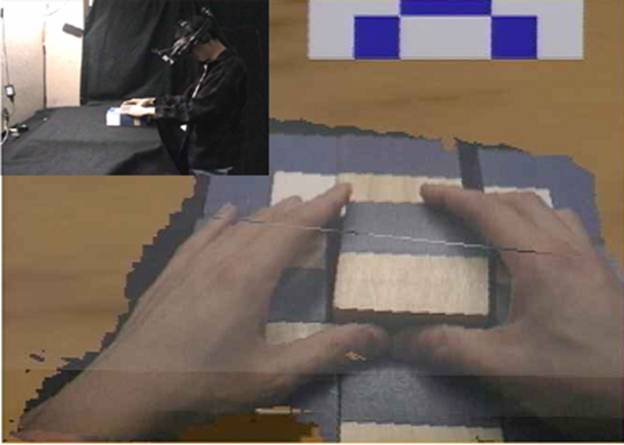
Visually-Faithful Hybrid Environment (VFHE). Participants wore only the HMD. The self-avatar was visually faithful, as the shape reconstruction was texture-mapped with images from a HMD mounted camera. The participant saw an image of his own hands (Figure 6).
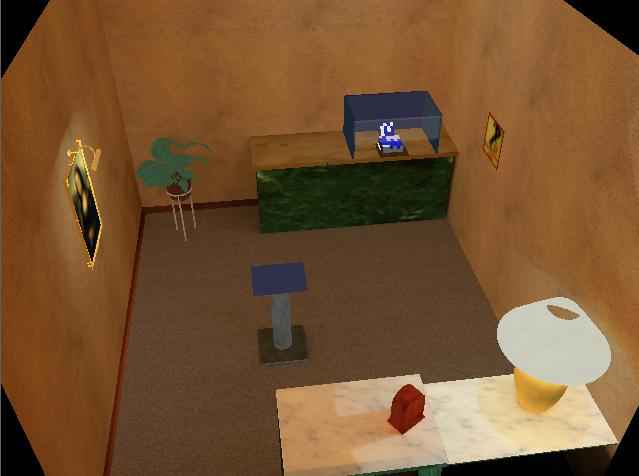
Virtual Environment. The VE
room was identical in all three of the virtual conditions (PVE, HE, VFHE). It had several virtual objects, including a
lamp, plant, and painting, along with a virtual table that was registered with
a real Styrofoam table. The enclosure in
the RSE was also rendered with transparency in the VE (Figure 7).
All the VE conditions were rendered on an SGI Reality Monster. The PVE ran on one rendering pipe at a minimum of twenty FPS. The HE and VFHE ran on four rendering pipes at a minimum of twenty FPS for virtual objects and twelve FPS for reconstructing real objects. The reconstruction system used 4 cameras, with 0.3 seconds of estimated latency, and 1 cm reconstruction error. The participant wore a Virtual Research V8 HMD (640 x 480 resolution) that was tracked with the UNC HiBall optical tracker.
Rationale for Conditions. We expect a participant’s
RSE (no VE equipment) performance would produce the best results, as the
interaction and visually fidelity were optimal.
Thus, we compared how closely a
participant’s task performance in VE was to their RSE task performance. We compared the reported sense-of-presence in the VE
conditions to each other.
The RSE was used for task training to reduce variability in individual task performance and as a baseline. The block design task had a learning curve (examined through pilot testing), and performing the task in the RSE allowed participants to become proficient without spending additional time in the VE. We limited VE time to fifteen minutes, as many pilot subjects complained of fatigue after that amount of time.
- The PVE is a plausible approach to the task with current technology. All the objects were virtual, and interactions were accomplished with specialized equipment and gestures. The difference in task performance between the RSE and the PVE corresponded to the impedance of interacting with virtual objects.
- The HE evaluates the effect of real objects on task performance and presence.
- The VFHE evaluates the cumulative effect of real object interaction and visually faithful self-avatars on performance and presence. We were interested in how close participants’ performance in our reconstruction system would be to their ideal RSE performance.
3.4. Measures
Task Performance. Participants were timed on
replicating correctly the target
pattern. We also recorded if the
participant incorrectly concluded that target pattern was replicated. In these cases, the participant was informed
and continued to work on the pattern.
Each participant eventually completed every pattern correctly.
Sense-of-presence. Participants answered the Steed-Usoh-Slater Presence Questionnaire (SUS) after completing the task in the VE condition [15].
Other Factors. We also measured spatial ability and simulator sickness by using the Guilford-Zimmerman Aptitude Survey, Part 5: Spatial Orientation and the Kennedy – Lane Simulator Sickness Questionnaire.
Participant Reactions. After the VE session, we interviewed the participant on their impressions of their experience. We recorded self- and experimenter-reported behaviors.
3.5. Experiment Procedure
All participants completed a consent form and questionnaires to gauge their physical and mental condition, simulator sickness, and spatial ability.
Real Space. Next, the participant entered the room
with the real space environment (RSE) setup.
The participant was presented with
the wooden blocks and was instructed on the task. The participant was also told that they would
be timed, and to examine the blocks and become comfortable with moving
them. The cloth on the enclosure was
lowered, and the TV turned on.
The participant was
given a series of six practice patterns, three small (2 x 2) and then three
large (3 x 3). The participant was told
the number of blocks involved in a pattern, and to notify the experimenter when
they were done. After the practice
patterns were completed, a series of six timed test patterns were administered,
three small and three large. Between
patterns, the participant was asked to randomize the blocks’ orientations. The order of the patterns that each
participant saw was unique, though all participants saw the same twenty
patterns (real space: six practice, six timed, VE: four practice, four timed).
We recorded the time
required to complete each test pattern correctly. If the participant misjudged the completion
of the pattern, we noted this as an error and told the participant that the
pattern was not yet complete, and to continue working on the pattern. We did not stop the clock on errors. The final time was used as the task
performance measure for that pattern.
Virtual Space. Next, the participant entered a different room where the experimenter helped the participant put on the HMD and any additional equipment particular to the VE condition (PVE – tracked pinch gloves, HE – dishwashing gloves). Following a period of adaptation to the VE, the participant practiced on two small and two large patterns. The participant then was timed on two small and two large test patterns. A participant could ask questions and take breaks between patterns if so desired. Only one person (a PVE participant) asked for a break.
Post Experience. Finally, the participant was interviewed about
their impressions of and reactions to the session. The debriefing session was a semi-structured
interview. The specific questions asked
were only starting points, and the interviewer could delve more deeply into
responses for further clarification or to explore unexpected conversation
paths.
The participant filled out the simulator sickness questionnaire again. By comparing their pre- and post-experience scores, we could assess if their level of simulator sickness had changed while performing the task. Finally, an expanded Slater – Usoh – Steed Virtual Presence Questionnaire was given to measure the participant’s sense of presence in the VE.
Managing Anomalies. If the head or hand tracker lost tracking or crashed, we quickly restarted the system (about 5 seconds). In almost all the cases, the participants were so engrossed with the task they never noticed the lack of tracking and continued working. We noted long or repeated tracking failures, and participants who were tall (which gave the head tracker problems) were allowed to sit to perform the task. None of the tracking failures appeared to significantly affect the task performance time.
On hand were additional patterns for replacement of voided trials, such as if a participant dropped a block onto the floor. This happened twice and was noted.
3.6. Hypotheses
Task Performance. Participants who manipulate real objects in the VE (HE, VFHE) will complete the spatial cognitive manual task significantly closer to their RSE task performance than will participants who manipulate virtual objects (PVE), i.e. interacting with real objects improves task performance. Further, there will not be a significant difference in task performance for VFHE and HE participants, i.e. interacting with real objects improves task performance regardless of self-avatar visual fidelity.
Sense-of-Presence. Participants represented in the VE by a visually faithful self-avatar (VFHE) will report a higher sense-of-presence than will participants represented by a generic self-avatar (PVE, HE), i.e. avatar visual fidelity increases sense-of-presence. Further, there will not be a significant difference in sense-of-presence for HE and PVE participants, i.e. generic self-avatars would have similar effects on sense-of-presence regardless of the presence of real objects.
4. Results
We use a two-tailed t-test with unequal variances and an a=0.05 level for significance.
4.1. Subject Information
Forty participants completed the study, thirteen in the purely virtual environment (PVE) and hybrid environment (HE), and fourteen in the visually-faithful hybrid environment (VFHE). They were primarily male (thirty-three) undergraduate students enrolled at UNC-CH (thirty-one). Participants were recruited from UNC-CH Computer Science classes and word of mouth.
They reported little prior VE experience (M=1.37, s.d.=0.66), high computer usage (M=6.39, s.d.=1.14), and moderate – 1 to 5 hours a week – computer/video game play, on [1..7] scales. There were no significant differences between the groups.
During the recruiting process, we required participants to have taken or be currently enrolled in a higher-level mathematics course (equivalent of a Calculus 1 course). This greatly reduced participant spatial ability variability, and in turn reduced task performance variability.
4.2. Task Performance
The dependent variable for task performance was the difference in the time to correctly replicate the target pattern in the VE condition compared to the RSE.
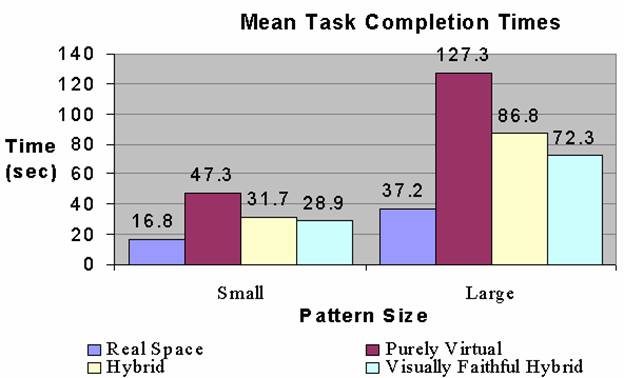
Table 1 – Task performance results
|
|
Small Pattern Time (seconds) |
Large Pattern Time (seconds) |
||
|
|
Mean |
S.D. |
Mean |
S.D. |
|
RSE (n=40) |
16.81 |
6.34 |
37.24 |
8.99 |
|
PVE (n=13) |
47.24 |
10.43 |
116.99 |
32.25 |
|
HE (n=13) |
31.68 |
5.65 |
86.83 |
26.80 |
|
VFHE (n=14) |
28.88 |
7.64 |
72.31 |
16.41 |
Table 2 – Difference between VE and RSE times
|
|
Small Pattern Time (seconds) |
Large Pattern Time (seconds) |
||
|
|
Mean |
S.D. |
Mean |
S.D. |
|
PVE - RSE |
28.28 |
13.71 |
78.06 |
28.39 |
|
HE - RSE |
15.99 |
6.37 |
52.23 |
24.80 |
|
VFHE - RSE |
13.14 |
8.09 |
35.20 |
18.03 |
Table 3 – Between groups task performance
|
|
Small Pattern |
Large Pattern |
||
|
|
t-test |
p-value |
t-test |
p-value |
|
PVE - RSE vs. VFHE - RSE |
3.32 |
0.0026** |
4.39 |
0.00016*** |
|
PVE - RSE vs. HE - RSE |
2.81 |
0.0094** |
2.45 |
0.021* |
|
VFHE - RSE vs. HE - RSE |
1.02 |
0.32 |
2.01 |
0.055+ |
Significant at the a *=0.05, **=0.01, ***=0.001, +
- requires further investigation
4.3. Sense-of-Presence
The dependent variable was the sense-of-presence score on the Steed-Usoh-Slater Presence
Questionnaire. We augmented the standard Steed-Usoh-Slater Presence Questionnaire with
two questions that focused on the participants’ perception of their
self-avatars.
· How much did you associate with the visual representation of yourself (your avatar)? During the experience, I associated with my avatar (1. not very much, 7. very much)
· How realistic (visually, kinesthetically, interactivity) was the visual representation of yourself (your avatar)? During the experience, I thought the avatar was (1. not very realistic, 7. very realistic)
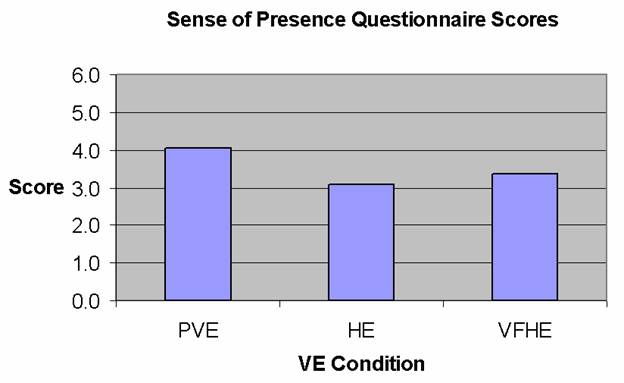
Table 4 – Steed-Usoh-Slater sense-of-presence scores
|
|
Sense-of-presence score (0..6) |
|
|
|
Mean |
S.D |
|
Purely Virtual Environment |
3.21 |
2.19 |
|
Hybrid Virtual Environment |
1.86 |
2.17 |
|
Visually Faithful Hybrid Environment |
2.36 |
1.94 |
Table 5 – Self-avatar questions scores
|
|
Avatar association (1. Not very much… 7. Very much) |
Avatar realism (1. Not very realistic… 7. Very realistic) |
||
|
|
Mean |
S.D. |
Mean |
S.D. |
|
Purely Virtual Environment |
4.43 |
1.60 |
3.64 |
1.55 |
|
Hybrid Environment |
4.79 |
1.37 |
4.57 |
1.78 |
|
Visually Faithful Hybrid Environment |
4.64 |
1.65 |
4.50 |
1.74 |
Table 6 – Sense-of-presence between groups
|
|
Between groups sense-of-presence |
|
|
|
t-test |
p-value |
|
PVE vs. VFHE |
1.10 |
0.28 |
|
PVE vs. HE |
1.64 |
0.11 |
|
VFHE vs. HE |
0.64 |
0.53 |
4.4. Other Factors
Simulator sickness and
spatial ability were not significantly different between groups. Spatial ability was moderately correlated (r
= -0.31 for small patterns, and r = -0.38 for large patterns) with
performance.
Table 7 – Simulator sickness and spatial ability between groups
|
|
Simulator Sickness |
Spatial Ability |
||
|
|
t-test |
p-value |
t-test |
p-value |
|
PVE vs. VFHE |
1.16 |
0.26 |
-1.58 |
0.13 |
|
PVE vs. HE |
0.49 |
0.63 |
-1.41 |
0.17 |
|
VFHE vs. HE |
-0.57 |
0.58 |
0.24 |
0.82 |
5. Discussion
5.1. Task Performance
For small and large
patterns, both VFHE and HE task performances were significantly better than PVE
task performance (Table 1). The
difference in task performance between the HE and VFHE was not significant at
the a=0.05 level (Table 3).
As expected, performing
the block-pattern task took longer in any VE than it did in the RSE. The PVE participants took about three times
as long as they did in the RSE (Table 2). The HE and
VFHE participants took about twice as long as they did in the RSE.
We accept the task
performance hypothesis; interacting with real objects significantly affected
task performance over interacting with virtual objects.
In the SUS Presence
Questionnaire, participants were asked how well they thought they achieved the
task, from 1 (not very well) to 7 (very well).
The VFHE participants responded significantly (t27=2.23,
p=0.0345) higher (M=5.43, s.d.=1.09) than PVE participants (M=4.57, s.d.=0.94).
For the case we
investigated, interacting with real objects provided a quite substantial
performance improvement over interacting with virtual objects for cognitive
manual tasks. Although task
performance in the VEs was substantially worse than in the RSE, the task
performance of HE and VFHE participants was significantly better than for PVE
participants. There is a slight
difference between HE and VFHE performance (Table 3, p=0.055), and we do not have a hypothesis as to the
cause of this result. This is a
candidate for further investigation. The
significantly poorer task performance when interacting with virtual objects
leads us to believe that the same hindrances would affect task learning,
training, and practice.
5.2. Sense of Presence
Although interviews
showed visually faithful self-avatars (VFHE) were preferred, there was no
statistically significant difference in sense-of-presence compared to those
presented a generic self-avatar (HE and PVE).
There were no statistically
significant differences at the a=0.05 level between any of the conditions for all
sense-of-presence questions.
We reject the
sense-of-presence hypothesis; a visually faithful self-avatar did not increase
sense-of-presence in a VE, compared to a generic self-avatar.
Slater cautions against the use of the SUS Questionnaire to compare presence across VE conditions, but also points out that no current questionnaire appears to support such comparisons. Just because we did not see a presence effect does not mean that there was none.
5.3. Participant Response to the
Self-Avatar
In the analysis of the post-experience interviews, we identified trends in the participants’ responses. When reviewing the results, please note that not every participant had a response to a question that could be categorized. In fact, most participants spent much of the interview explaining how they felt the environment could be improved, regardless of the question!
The post-experience
interviews showed that many participants in the HE and PVE noted that the
“avatar moved when I did” and gave a high mark to the self-avatar
questions. Some in the VFHE said, “Yeah,
I saw myself” and gave an equally high mark.
This resulted in similar scores to the questions on self-avatar
realism.
Participants presented
with generic avatars, the PVE and HE conditions, remarked that the motion
fidelity of the self-avatars contributed to their sense-of-presence. In
fact, all comments on avatar realism from PVE and HE conditions related to
motion accuracy.
· “It was pretty normal, it moved the way my hand moved. Everything I did with my hands, it followed.”
· "The only thing that really gave me a sense of really being in the virtual room was the fact that the hands moved when mine moved, and if I moved my hand, the room changed to represent that movement."
· "Being able to see my hands moving around helped with the sense of ‘being there’."
On the other hand, many, but not all, of the VFHE
participants explicitly commented on the visual fidelity of the avatars as an
aid to presence. In fact, all comments on avatar realism from VFHE related to visual
accuracy.
· “Nice to have skin tones, yes (I did identify with them)”
· "Yeah, those were my hands, and that was cool... I was impressed that I could see my own hands"
· “Appearance looked normal, looked like my own hands, as far as size and focus looked absolutely normal… I could see my own hands, my fingers, the hair on my hands”
From the interviews, we conclude participants who commented on the visual fidelity of their self-avatar assumed that its movement would also be accurate. We hypothesize visual fidelity encompasses kinetic fidelity.
In hindsight, the
different components of the self-avatar (appearance, movement, and
interactivity) should perhaps have been divided into separate questions. Steed, one of the designers of the SUS
Questionnaire, noted that the cognitive load of the block task could make it
hard to detect the relatively sensitive sense-of-presence measures. Regardless of condition, the responses had a
movement first, appearance second trend.
We hypothesize kinematic fidelity of the avatar is significantly more
important than visual fidelity for sense-of-presence. Developing techniques to determine the effect
of visual fidelity, separate from dynamic fidelity, on sense-of-presence, could be an area of future research. We believe that visual fidelity is important,
but the impact on sense-of-presence might not be too strong.
Perhaps two quotes sum up the visually-faithful self-avatars best:
- “I thought that was really good, I didn't even realize so much that I was virtual. I didn't focus on it quite as much as the blocks. “
- “I forget… just the same as in reality. Yeah, I didn't even notice my hands.”
5.4. Debriefing Trends
Task Performance.
· Among the reconstruction system participants (HE and VFHE), 75% noticed the reconstruction errors and 25% noticed the reconstruction lag. Most complained of the limited field of view of the working environment. Interestingly, the RSE had a similar limited working volume and field of view, but no participant mentioned it.
· 93% of the PVE and 13% of the HE and VFHE participants complained that the interaction with the blocks was unnatural.
· 25% of the HE and VFHE participants felt the interaction was natural.
Sense-of-Presence. Participants in all VE groups commented that the following increased their VE sense-of-presence:
· Performing the task.
· Seeing a self-avatar.
· Virtual objects in the room (such as the painting, plant, and lamp), even though they had no direct interaction with these objects.
When asked what factors increased their VE sense-of-presence:
· 26% of HE and VFHE participants said having the real objects and tactile feedback.
· 65% of VFHE and 30% of HE participants said that their self-avatar “looked real”.
When asked what factors decreased their VE sense-of-presence:
· 43% of PVE participants said the blocks not being there or behaving as expected.
· 11% of HE and VFHE participants said manipulating real objects because “they reminded them of the real world.”
· 75% of HE and VFHE participants said the reconstruction errors, lag, and field of view.
Finally, participants were asked how many patterns they needed to practice on before they felt comfortable interacting with the virtual environment. VFHE participants reported feeling comfortable with the task significantly more quickly than PVE participants (T26 = 2.83, p=0.0044) at the a=0.01 level. Participants were comfortable with the workings of the VE almost an entire practice pattern earlier (1.50 to 2.36 patterns).
Overall. The following trends were consistent with previous research or our VE experiences:
· Working on a task heightened sense-of-presence.
· Interacting with real objects heightened sense-of-presence.
· VE latency decreased sense-of-presence.
5.5. Observations
· The interactions to rotate the block dominated the difference in times between VE conditions. The typical methodology was to pick up a block, rotate it, and check if the new face matched the desired pattern. If it did not match, rotate again. If it matched, place the block in the appropriate place and get the next block.
· The second most significant component of task performance was the selection and placement of the blocks.
These factors were improved through the tactile feedback, natural interaction, and motion constraints of handling real blocks.
Using the one-size-fits-all pinch gloves had some unexpected fitting and hygiene consequences, even in the relatively small fourteen-participant PVE group.
· Two members had large hands and had difficulty fitting into the gloves.
· Two of the participants had small hands and had difficulty registering pinching actions because the gloves’ sensors were not positioned appropriately.
· One participant became nauseated and quit mid-way through the experiment. The pinch gloves became moist with sweat, and became a hygiene issue for subsequent participants.
We also saw evidence that the misregistration between the real and virtual space in the PVE affected participant’s actions. Recall that while the participant made a pinching gesture to pick up a block, visually they saw the avatar hand grasp a virtual block (Figure 10). This misregistration caused 25% of the participants to forget the pinching mnemonic and try a grasping action (which at times did not register with the pinch gloves). If the experimenter observed this behavior, he reminded the participant to make pinching motions to grasp a block.



The PVE embodied several interaction shortcuts for common tasks. For example, blocks would float in midair if the participant released the block more than six inches above the table. This eased the rotation of the block and allowed a select, rotate, release mechanism similar to a ratchet wrench. Some participants, in an effort to maximize efficiency, learned to grab blocks and place them all in midair before the beginning of a pattern. This allowed easy and quick access to blocks. The inclusion of the shortcuts was carefully considered to assist in interaction, yet led to adaptation and learned behavior.
In the RSE, participants worked on matching the mentally subdivided target pattern one subsection at a time. Each block was picked up and rotated until the desired face was found. Some participants noted that this rotation could be done so quickly that they just randomly spun each block to find a desired face. In contrast, two PVE and one HE participant remarked that the slower interaction of block rotation in the VE influenced them to memorize the relative orientation of the block faces to improve performance. For training applications, participants developing VE-specific behaviors, inconsistent with their real world approach to the task, could be detrimental to effectiveness or even dangerous.
Manipulating real objects also benefited from natural motion constraints. Tasks such as placing the center block into position in a nine-block pattern and closing gaps between blocks were easily done with real objects. In the PVE condition (all virtual objects), these interaction tasks would have been difficult and time-consuming. We provided snapping upon release of a block to alleviate these handicaps, but this involved adding artificial aides that might be questionable based if the system was used for learning or training a task.
6. Conclusions
Interacting with real objects significantly improves task
performance over interacting with virtual objects in spatial cognitive tasks,
and more importantly, it brings performance measures closer to that of
doing the task in real space. Handling
real objects makes task performance and interaction in the VE more like the
actual task.
Further, the way participants perform the task in the VE using real objects is more similar to how they would do it in a real environment. Even in our simple task, we saw evidence that manipulating virtual objects sometimes caused participants incorrectly associate interaction mechanics and develop VE-specific approaches.
Training and simulation VEs are trying to recreate real experiences and would benefit from having the participant manipulate as many real objects as possible. The motion constraints and tactile feedback of the real objects provide additional stimuli that create an experience much closer to the actual task than one with purely virtual objects. Even if an object reconstruction system is not used, we believe that instrumenting, modeling and tracking the real objects that the participant will handle would significantly enhance spatial cognitive tasks.
Motion fidelity is more important than visual fidelity for self-avatar believability. We believe that a visually faithful self-avatar is better than a generic self-avatar, but from a sense-of-presence standpoint, the advantages do not seem very strong. Designers should focus their efforts on tracking then on rendering the self-avatar model for immersive VEs. We believe that texture mapping the self-avatar model with captured images of the user would be a big step towards visual fidelity and result in an immersion benefit.
7. Future Work
Does interacting with real objects expand the application base of VEs? We know that the purely virtual aspect of current VEs has limited the applicability to some tasks. We look to identify the types of tasks that would most benefit from having the user handle real objects.
Which aspects of a self-avatar are important for presence, and specifically does visually fidelity affect presence in VEs? We believe it does. Yet even if this is true, how strong an effect does it have? Even though our study does not show a significant difference in presence, the participant interviews leads us to believe there is some consequence. Future work would involve identifying tasks and measures that can isolate the effect of self-avatar visual fidelity on presence.
8. Acknowledgements
9. Bibliography
[2]
I. Sutherland. “The Ultimate Display”, In Proceedings
of IFIP 65, Vol 2, pp 506, 1965.
[3]
M. Slater and M. Usoh. “The Influence of a Virtual
Body on Presence in Immersive Virtual Environments”, VR 93, Virtual Reality
International, Proceedings of the Third Annual Conference on Virtual Reality,
[7] D. Pertaub,
M. Slater, and C. Barker. “An Experiment on Fear of Public Speaking in Virtual
Reality”, Medicine Meets Virtual Reality 2001, pp. 372-378, J. D.
Westwood et al. (Eds) IOS Press, ISSN 0926-9630.
[14] D. Wechsler.
The Measurement of Adult Intelligence, 1st Ed.,
[15] M. Usoh, E. Catena, S. Arman, and M. Slater. “Using
Presence Questionnaires in Reality”, Presence: Teleoperators and Virtual Environments, Vol. 9,
No. 5, pp. 497-503.
Figure 1 - Image of the wooden blocks manipulated by the participant to match a target pattern.
Figure 2 – Each participant performed the task in the RSE and then in one of the three VEs.
Figure 3 – Real Space Environment (RSE). Participant watches a small TV and manipulates wooden blocks to match the target pattern.
Figure 4 – Purely Virtual Environment (PVE). Participant wore tracked pinchgloves and manipulated virtual objects.
Figure 5 – Hybrid Environment (HE). Participant manipulated real objects while wearing dishwashing gloves to provide a generic avatar.
Figure 6 – Visually Faithful Hybrid Environment (VFHE). Participants manipulated real objects and were presented with a visually faithful self-avatar.
Figure 7 – VE for all three virtual conditions.
Figure 8 - Mean time to correctly match the target pattern in the different conditions.
Figure 9 - Mean SUS sense-of-presence questionnaire scores for the different VEs.
Figure 10 – The participant pinches (left) to
pick up a block (center). Midway through
the experiment, some participants started using a grabbing motion (right).